There is an active AI, machine learning, and robotics research cluster in the CS department at UNH, involving multiple faculty:
- Momotaz Begum: Cognitive Assistive Robotics
- Laura Dietz: Information retrieval, machine learning
- Wheeler Ruml: Heuristic search, planning, robotics
- Marek Petrik: Machine learning, planning, optimization
More information about the AI and Robotics group is available at the UNH AI Wiki. More information about robotics at UNH more generally is available here.
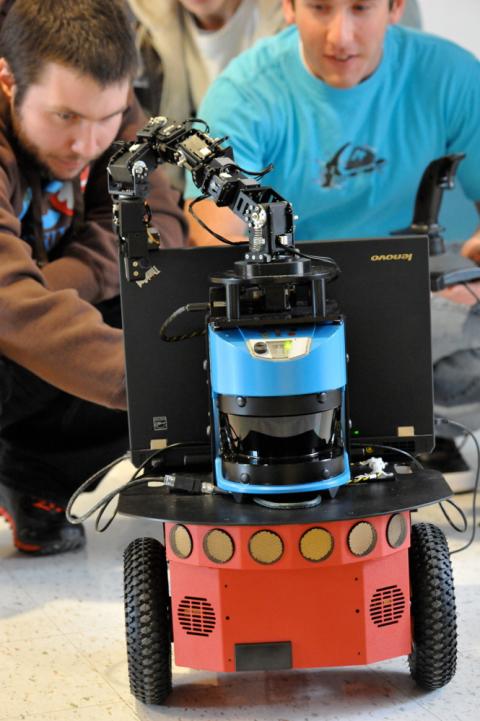
Some of our work uses physical robots, equipped with SICK lidars, RGBD cameras, and 7 DOF arms.
Some of our work uses simulated or video-game worlds. Here's an example of a UNH-developed heuristic search algorithm (Bugsy) guiding a video-game agent quickly to a goal. A* takes a long time to find an "optimal" plan and Speedy very quickly finds a very long plan. Bugsy explicitly optimizes the total (planning + plan execution) time to the goal.
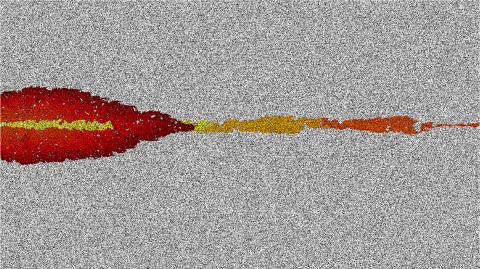
Here's a visualization of A* search solving a video-game-style pathfinding problem. The colors correspond to the time a map cell was visited during the search.
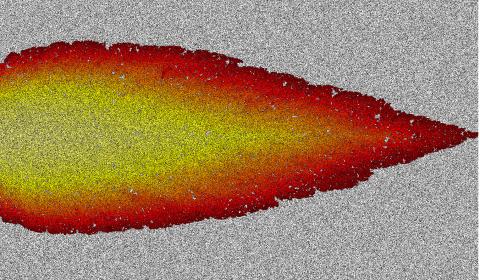
Here's a UNH-developed search algorithm (Optimistic Search) solving the same kind of problem. You can easily see that it's much faster than A* and touches many fewer cells in the map. Yet we can still prove strict bounds on the cost of the solution that it returns!